现在大家听到「车位到车位」这个功能,可能觉得有点无感,行业陆续有几家推出相关功能,但这次小鹏基于 VLA 架构的车位到车位,还是做出了特点,
不靠扫图,不靠云端预置,让车子自己学、自己记、自己算,把「停在哪、怎么停」变成智能用车体验的一部分,下面说一说这套方案,我的几个感受:
首先是 「无感自学习」是真无感,以前记车位还要手动学习记忆路线,现在只要你正常开进停车场、停好车,它就开始学习,第二次再来,导航界面会自动出现「到车位」选项,直接一键去上次的位置。
甚至还能标记电梯口、充电位、宽车位、树荫位等偏好点,系统会记住,方便下次自动规划泊车路径,你开过的地方、停过的车位、标记过的点,都会被吸收进车端的3D空间模型,像是一个「会成长的记忆停车」,这是 VLA 架构所带来的不同之处。
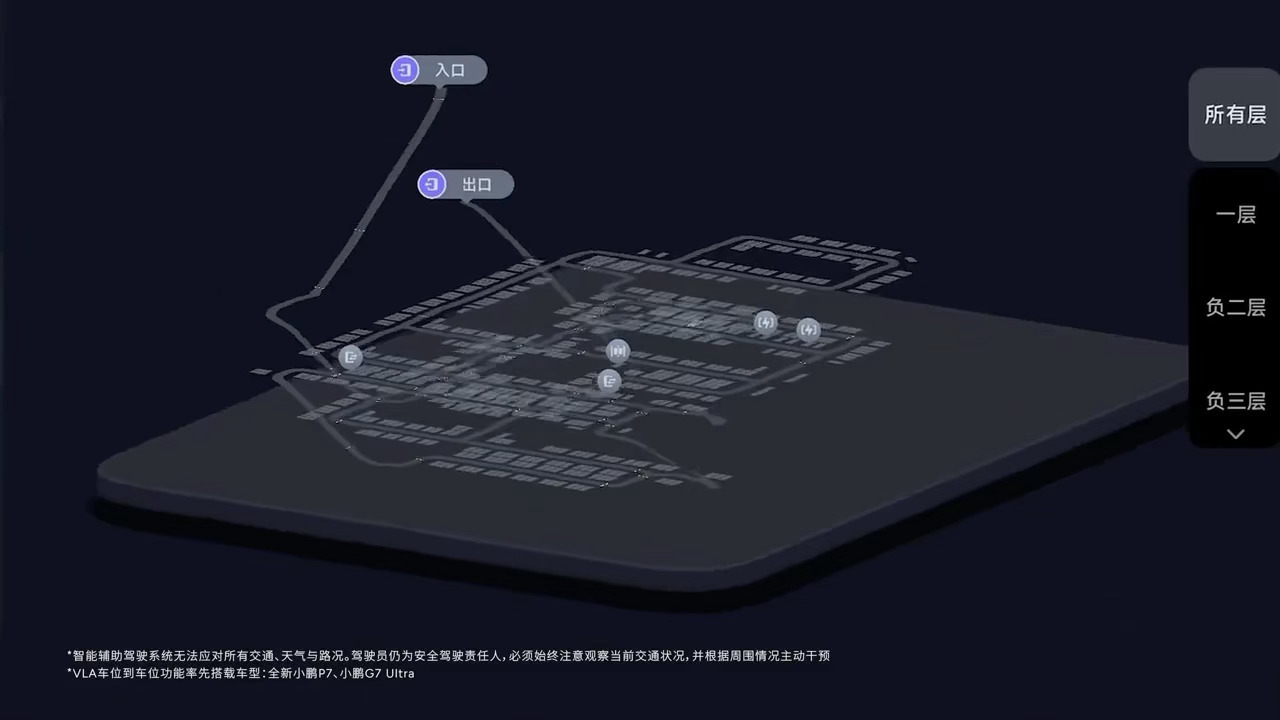
让我感触比较深的还有可视化,小鹏这套VLA车位到车位SR用的是视觉感知+大模型的方式建模,能把整个园区生成3D全景,不限楼层,就像你拥有一个停车场版本的「上帝视角」,
能看到每个车位、出入口、电梯口,甚至能理解这些空间之间的关系,甚至人脑可能都不具备这个空间想象能力,在功能逐步同质化的当下,小鹏的「 VLA 版车位到车位」确实做出了不一样的东西来。
这套 VLA 在泊车和行车场景下都展示出很强的基础能力,很明显这是背后技术栈统一的结果,可以认为小鹏 VLA 不再靠场景边界去定义能力,而是靠 VLA 模型和视觉理解去延展能力边界,
在这样的技术背景下才能更好的适配场景和解决泛化问题,让系统拥有类似人类的空间认知,甚至超越人类。
对普通用户来说,不需要学习、不需要研究、不需要担心兼容,全国都能用、全国都好用,只需在主驾上静静的做系统的「监管员」,好的体验最终是无感的。
而对行业爱好者来说,这是小鹏在 VLA 技术落地的结果,再次「从点到面」把各场景能力打通,接下来就是不断的强化这套体验,这个版本只是全新体验的开始,但已经展示出更高的上限。
小鹏Ultra升级VLA车位到车位小鹏汽车