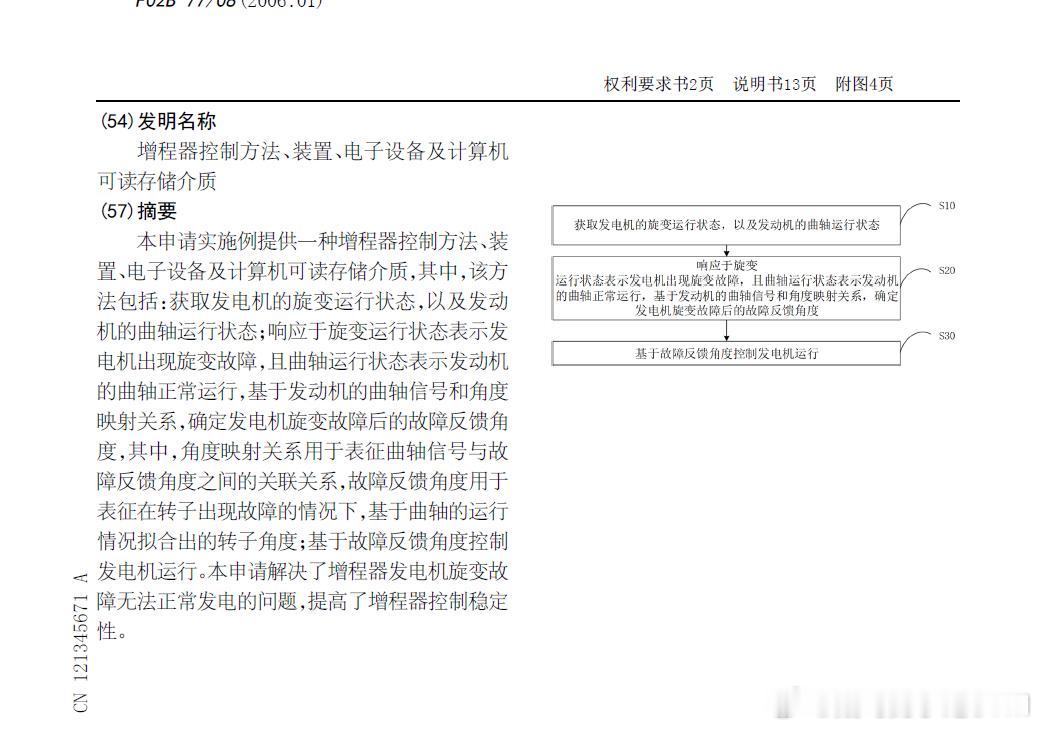
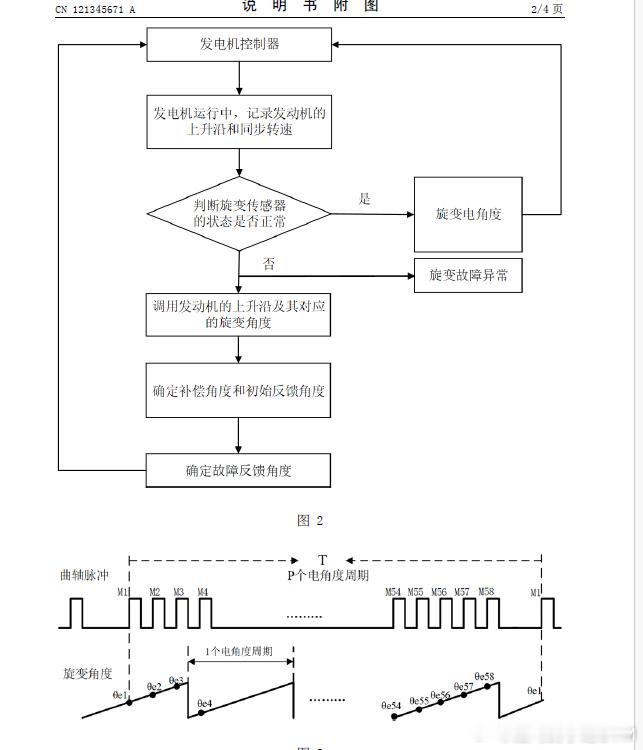
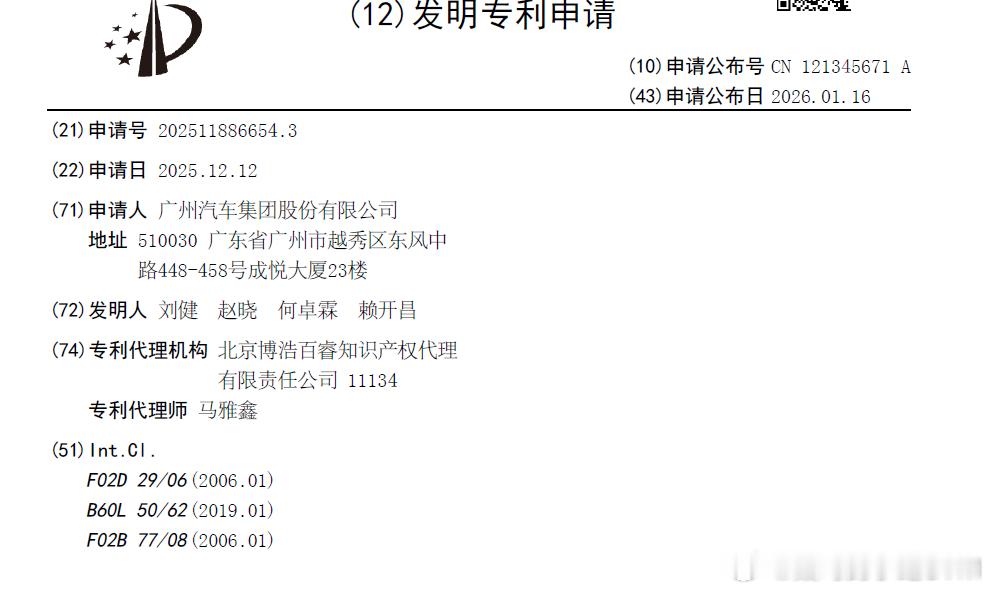
技术巡猎 广汽 “增程器控制方法、装置、电子设备及计算机可读存储介质“。增程产品最怕的,其实不是什么“油耗高“,事实上市面上增程第一轮卷起来的时候,理想和问界的价位指向的人群,对价格从来不会太敏感。增程更大的课题在于高速/长途的时候,突然跟你说发不了电了……真恐怖啊。为啥会这样呢?工程上,往往一个很小的单点故障,就足以掐断整条发电链路。这份专利解决的就是这种问题:发电机的旋变信号异常。旋变是什么呢?你可以理解成“电机的指南针”。发电机要把机械转动变成电能,控制器得先知道转子此刻转到哪里去了,才能按正确的节奏去递送电流---节奏如果错了,轻则发电效率下降、或者有噪声,重则电流乱跳直接停机。很多时候旋变挂了就等于“眼睛瞎了”,此时最安全的策略就是停机。但增程器的现实情况在于,发动机还在那儿转呢,机械能事实上是在的,这时候如果停掉发电机,就相当于把水龙头给拧死了,轮端就……广汽这份专利做的事情,在于给“角度”加冗余,不加硬件,靠已有信号继续兜底继续发电。它利用了一个非常关键的存在。很多增程器架构里,发动机曲轴和发电机转子是直连的(或者等效直连),发动机上本来就有曲轴位置传感器,尤其常见的是“缺齿”那套信号。缺齿就像一把带缺口的尺子,每转一圈会产生一串整齐的脉冲,中间留一个“缺口”用来告诉你“我们回到起点了”。这玩意儿在发动机控制里非常成熟、非常可靠,所以它的思路就顺理成章。平时旋变正常的时候,依然用旋变做主角,因为它角度连续、精度高。与此同时,系统偷偷“抄作业”:把曲轴缺齿信号的每个上升沿(专利里甚至把一圈里每个上升沿编号成 M1、M2…)对应的旋变角度记录下来,形成一个“映射表”。你可以这么想像,“曲轴尺子上的每个刻度,对应电机电角度是多少”。而一旦旋变异常,但曲轴信号还正常,就切换到曲轴当主角,先用“最近一次上升沿编号”去映射表里查一个“初始角度”,然后再用转速估算在两个脉冲之间转过了多少角度,做个补偿,此时角度就可以连续起来了,最后得到一个故障工况下的反馈角度,那么发电机依然可以得到控制。这里面有两个细节。第一,它没把曲轴信号当成天然精准的角度源。我知道很多人的第一反应,就是曲轴角度不就是机械角度吗?为啥不直接换算呢?工程上真没这么简单。极对数、安装相位、装配误差、传动间隙、甚至传感器安装偏差,都会让映射这件事存在一个固定偏置,甚至还有微小的非线性。第二,它意识到缺齿脉冲是离散的,直接用会出现抖动。缺齿一圈就几十个脉冲,两个脉冲之间角度跨度不小。你要是只在脉冲到来的瞬间更新角度,发电机控制会和走楼梯一样,一格一格地跳,电流环和扭矩都会不舒服。专利里用了一个很典型的补偿方式:用曲轴转速(再乘极对数换到电角速度)× 两次采样的时间差,算出“这段时间转过了多少角度”,再把上升沿之间的角度补出来。甚至还考虑到了发电机停机/再启动的场景:在故障模式下,如果发电机暂时停了,系统会保存当时的上升沿编号和故障角度,下一次再运行时能接着算,避免重启的时候,角度出现大的波动。当然,聊深一点,这方案的价值不在“算角度”这三个字,而在它背后的系统观。1.不加第二套角度传感器,减少成本和包装难度;2.但又不接受单点失效带来的整机停摆,还是要考虑可用性;3.本质上是在做“功能安全/可靠性”的工程折中。嗯,增程器在用户心里,平时你不想要思考它的存在,但关键的时候,你需要它的稳定,这就是“稳定”背后默默发生的一些事情了。