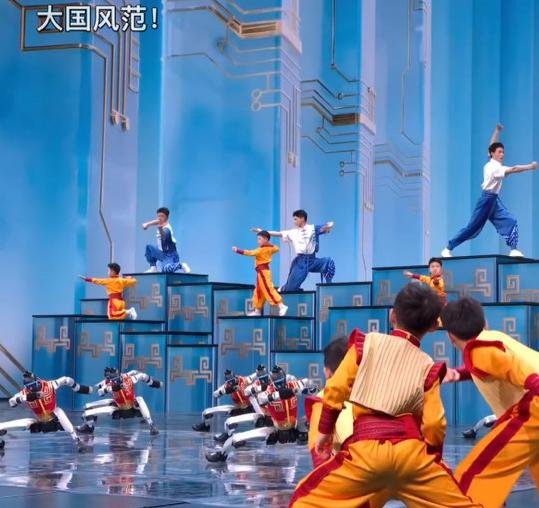
看到刚刚春晚上表演武术的机器人了么?汗毛都竖起来了!起初表演小品的机器人,似乎更符合我心中的机器人形象,是道具而不是工具。但随后那一群表演武术的机器人后空翻的时候,看到它们后空翻落地调整姿态的那一刻,我真的惊了。太像了,真的太像人了。 小品里的机器人看着更像精心设计的表演道具,它们的动作多是提前设定好的固定流程,配合语言类节目完成简单互动,没有太多需要自主调整的动态环节,这也符合大家对机器人“按程序办事”的固有印象。 但武术表演里的机器人完全打破了这种认知,尤其是后空翻落地时那一瞬间的姿态调整,之所以让人觉得格外像人,核心在于它们不再是机械执行指令,而是具备了类似人类的动态感知和实时决策能力。 这种拟人化表现的背后,首先是硬件层面的极致突破。 武术机器人搭载了,专门研发的高功率伺服电机,仅膝关节的最大输出扭矩就能达到120N·m,这种强劲动力让机器人能瞬间爆发力量,完成空翻所需的起跳和翻转动作。 更关键的是关节自由度的提升,主流机型拥有23到43个主动关节,尤其是腰部的高自由度模组,能实现类似人类的肢体扭转和韵律感,彻底摆脱了早期机器人动作的僵硬感。 这些关节还采用双编码器全闭环控制,精度能达到毫米级,比头发丝还要细的误差控制,让每一个武术招式的拆解都分毫不差,劈、扫、戳、挑等动作都显得精准有力。 支撑这些复杂动作的,是一套多传感器融合的感知系统。机器人身上的惯性测量单元就像内置的平衡中枢,能实时捕捉三轴角速度和加速度,配合足底压力传感器,每秒完成上千次数据采集。 再加上3D激光雷达和深度相机的辅助,机器人能实时扫描舞台环境,精准识别自身位置和人类搭档的动态,哪怕在空中翻转时也能保持空间定位,不会出现“晕头转向”的情况。 这套感知系统的响应速度快到毫秒级,能在0.03秒内判断人类演员的动作趋势,提前调整自身姿态,这也是为什么它们和武术少年对打时能做到见招拆招,看起来毫无违和感。 比硬件更核心的是算法层面的进化。这些机器人的武术技能,是在虚拟仿真环境中经过上亿次强化学习训练出来的,相当于在数字世界里反复摔倒、调整,最终掌握了发力时机和平衡技巧。 动态平衡算法是落地稳的关键,当机器人从空中落下时,系统能在0.3秒内完成重心重分配、关节扭矩调整和地面反作用力预测,快速化解落地冲击,就像人类下意识调整站姿一样自然。 而AI融合定位算法则解决了空翻时的定位难题,将运动感知数据与环境扫描数据实时融合,确保每次空翻都能精准落在预定位置,误差控制在厘米级。 小品机器人与武术机器人的本质区别,在于是否具备动态调整能力。 小品中的机器人主要承担互动功能,依赖预设程序完成变钱、讲笑话等简单动作,不需要应对复杂的动态场景,所以更像“会动的道具”。 而武术机器人需要面对的是高难度的肢体动作和不确定的互动场景,必须在表演中实时修正误差、调整姿态。 这种差异背后是技术定位的不同,小品机器人侧重人机交互的趣味性,而武术机器人则是具身智能的实战展示,通过硬件性能、感知精度和算法效率的协同,实现了从“执行指令”到“自主适应”的跨越。 更值得关注的是,这种拟人化表现离不开产业链的成熟和技术的国产化突破。前几年,能完成高动态动作的人形机器人成本极高,难以实现集群表演。 而随着国产关节电机、传感器等核心部件的技术成熟,不仅降低了制造成本,还提升了性能稳定性,让十几台机器人同时登台完成复杂动作成为可能。 同时,大模型技术的融入让机器人具备了更强的环境理解能力,不再是“背课文式”的机械表演,而是能根据现场情况做出灵活反应,比如提前感知人类演员的动作趋势,调整自身发力力度和动作幅度,这种“共情式”的配合让机器人看起来更有“灵性”。 武术机器人的惊艳表现,本质上是硬件、传感器、算法三者深度协同的结果。 强劲的动力硬件提供了拟人化动作的基础,高精度传感器赋予了机器人感知环境和自身状态的能力,而先进算法则让这些数据转化为自然流畅的动作调整。 从春晚舞台上的表现来看,它们已经突破了传统机器人的功能边界,不再是单纯展示技术的工具,而是能融入表演场景、与人类深度配合的“参与者”。 这种转变之所以让人感到震撼,正是因为它让大家看到了,机器人从“机械造物”向“类人智能体”进化的清晰轨迹,那些看似简单的落地调整,背后凝聚的是无数次技术迭代和优化,也正是这种技术突破,让机器人的动作越来越像人,越来越贴近大家对未来科技的想象。