技术巡猎 零跑 车门开关过程中重力做功的计算方法、装置、设备及介质---车门开关手感这件事,很多人第一反应会想到铰链、限位器、密封条,甚至想到“门重不重”。但是有件事经常被忽略---车门开关过程中,重力到底是在帮你,还是故意和你反着来?
零跑这项专利说的就是这个事情。车门开启过程中“重心怎么走、重力做了多少功”这件事,从三维软件里的反复手动测量,变成了一套可以参数化计算的方法。
车门并不是绕着一根绝对竖直的轴在转。
真实车辆上,车门上下铰链连起来是一条铰链轴线。这条轴线通常会有内外倾角、前后倾角。也就是说,车门打开的时候,并不是像门板绕一根笔直立柱做水平旋转那么简单。只要铰链轴线有倾斜,车门重心在空间里就会发生高度变化。
重心升高,意味着你在开门时要额外“抬起”一部分质量;重心降低,意味着车门可能会被重力带着往某个方向跑。用户感受到的“这门有点下坠”“这门开到某个角度会自己往外走”“这门开起来前半段轻、后半段沉”,很多时候不只是心理感受,而是重心轨迹真的出现了变化。
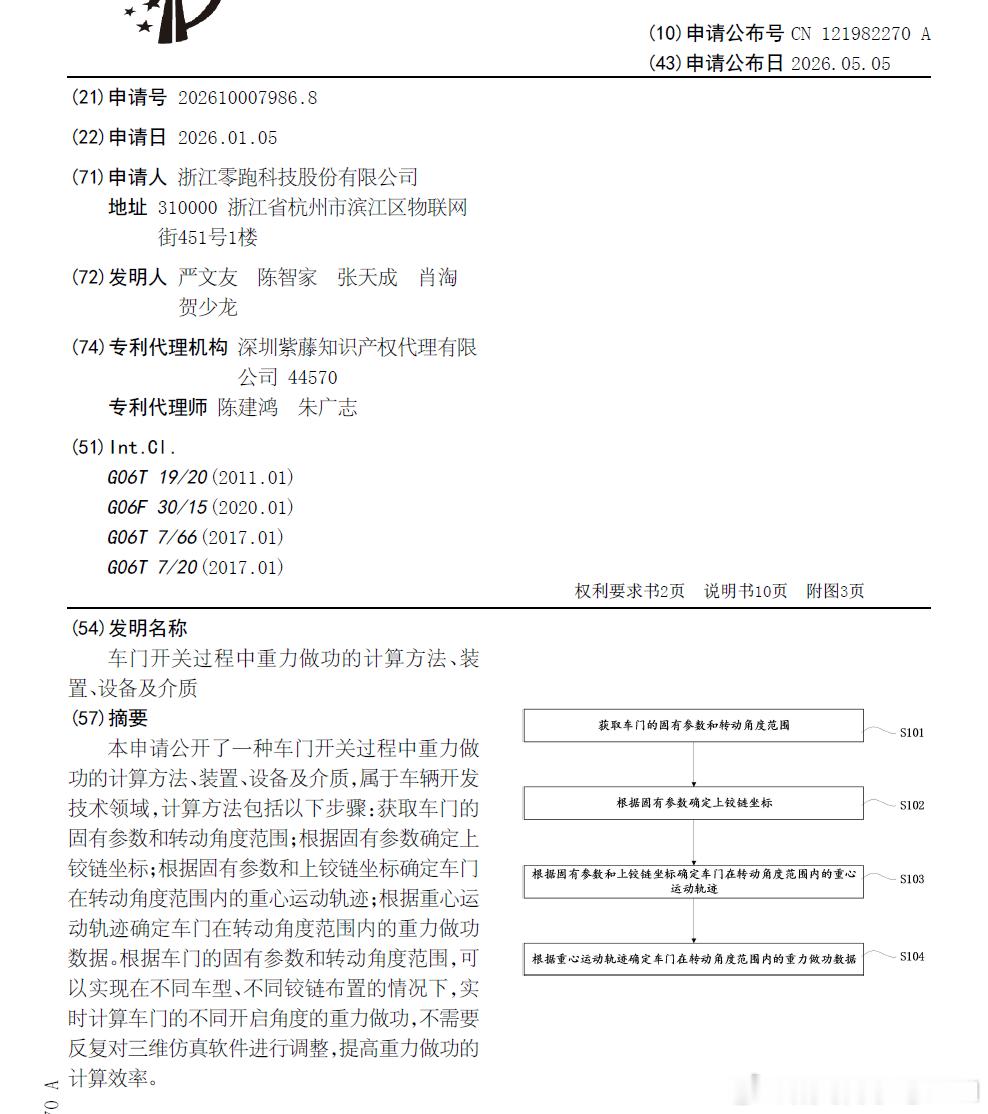
这项专利先拿到车门的一组基础参数,比如下铰链坐标、上下铰链间距、铰链内外倾角、铰链前后倾角、车门重心坐标、车门质量,以及车门从关闭到开启的角度范围。然后根据这些参数,推算出上铰链坐标。
上下铰链坐标一确定,铰链轴线就确定了。
接下来,系统会把车门重心投影到铰链轴线上。你可以把这个投影点理解成一个“旋转基准点”。车门打开时,重心不是随便乱跑,而是围绕这根铰链轴线,在空间里转出一条轨迹。专利里用的是向量、投影和旋转公式,把每一个开启角度下的重心坐标算出来。
普通人可以这样理解:以前工程师要知道车门开到15°、30°、45°、60°时重心在哪,可能要在三维软件里不断摆姿态、取坐标、再算高度差。现在这套方法把三维几何关系抽出来,只要输入参数,就能批量算出各个角度下的重心位置,再进一步算重力做功。
车门开发早期,铰链位置、铰链倾角、车门重量、内饰件布置、玻璃升降器位置,都可能变化。每变一次,重心和铰链关系都会变。如果每次都要回到三维软件里反复调整,效率非常低。更麻烦的是,三维软件常常更适合看某一个姿态,不一定方便连续输出一串开度下的重心坐标。
这项专利相当于把它变成一个工程计算模型。车型换了,参数换一下;铰链方案变了,参数换一下;车门质量调整了,参数再换一下。结果可以直接输出一条重力做功曲线。
这对于车门手感调校比较重要。
因为车门开关不是单一力的问题,而是很多因素叠在一起。铰链有摩擦,限位器有力矩,密封条会被压缩,车内外气压会影响关门阻力,电吸门或者电动门还有电机和控制策略。重力做功只是其中一项,但它是基础项。基础项算不准,后面做限位器、阻尼、关门力目标,都会有偏差。
比如一个车门开到某个角度突然变重,工程师需要判断:这是限位器设定的问题,还是密封反力的问题,还是铰链轴线导致重心在抬升?如果重力做功曲线已经算出来,就能先把这笔账拆出来,不至于靠感觉乱调。
专利里的计算逻辑,本质上是用重心高度差来推算重力做功。严格按物理公式,重力势能变化要看 mgh,也就是质量、重力加速度和高度差;如果坐标单位是毫米,还要做单位换算。工程实现时,这些量纲必须处理清楚。否则模型思路是对的,但表格里出来的数可能会差一个系数。这个属于落地细节,但对工程师很关键。
车门开关,看着是小事。小事做顺了,它才会是一台完成度比较高的车。