[RO]《HumanoidMimicGen: Data Generation for Loco-Manipulation via Whole-Body Planning》K Lin, A Mandlekar, C R Garrett, N Chernyadev… [NVIDIA] (2026)
在人形机器人模仿学习中,行走与操作数据稀缺是瓶颈。过去的生成方法依赖稳定末端控制,本质上无法处理腿、躯干、双臂耦合带来的平衡约束。
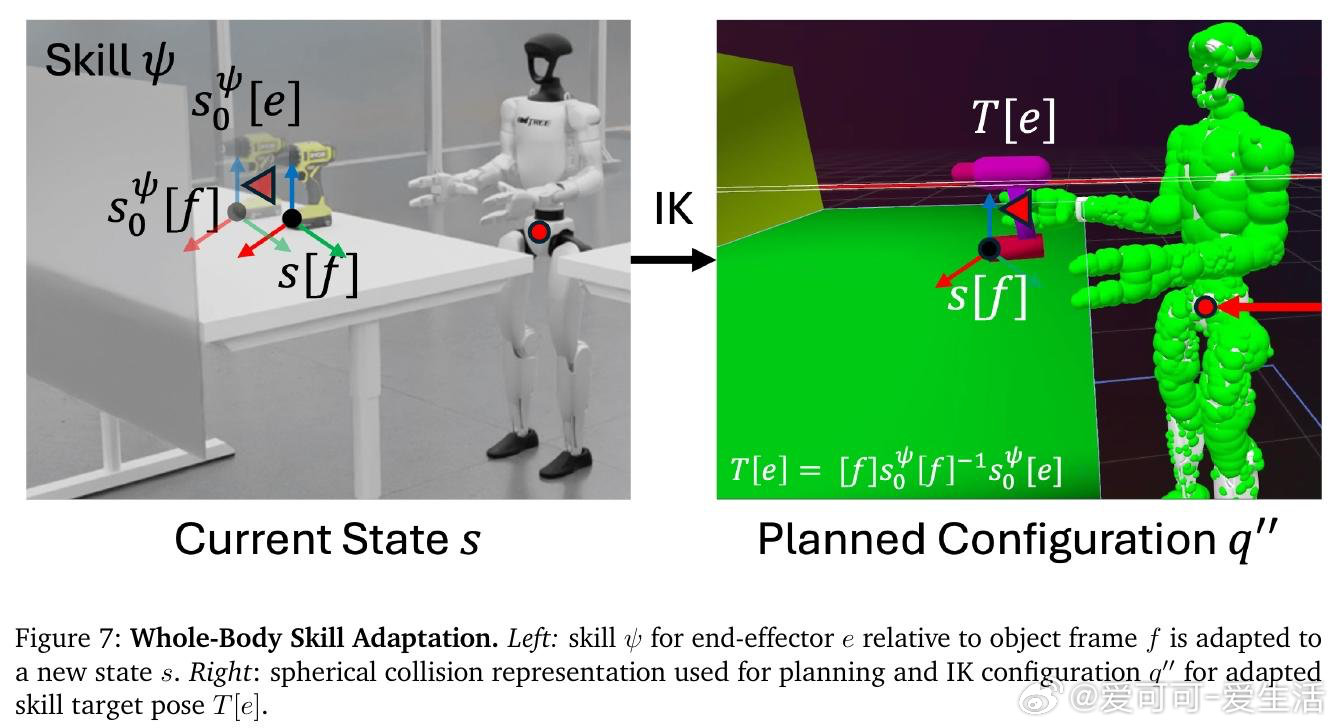
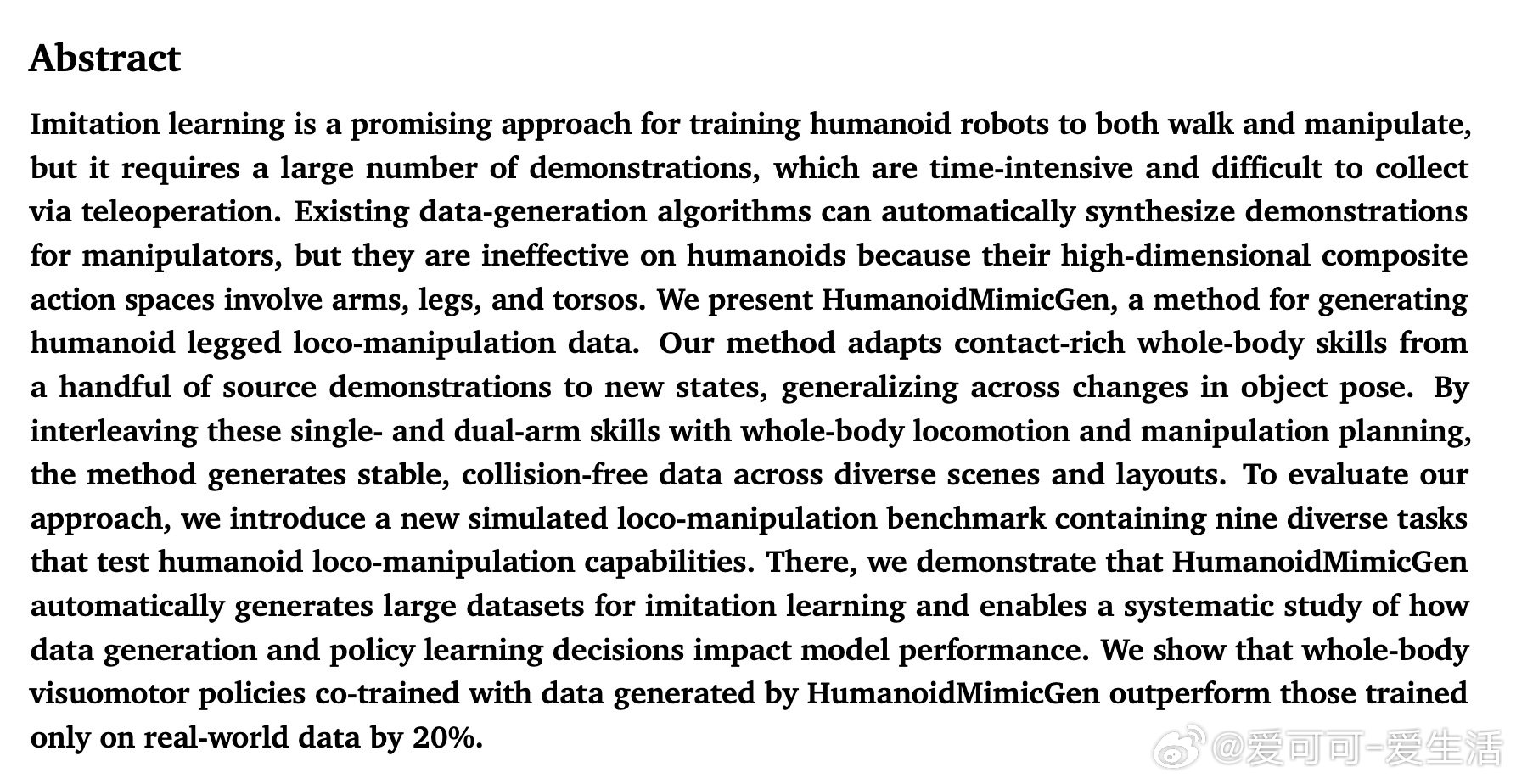
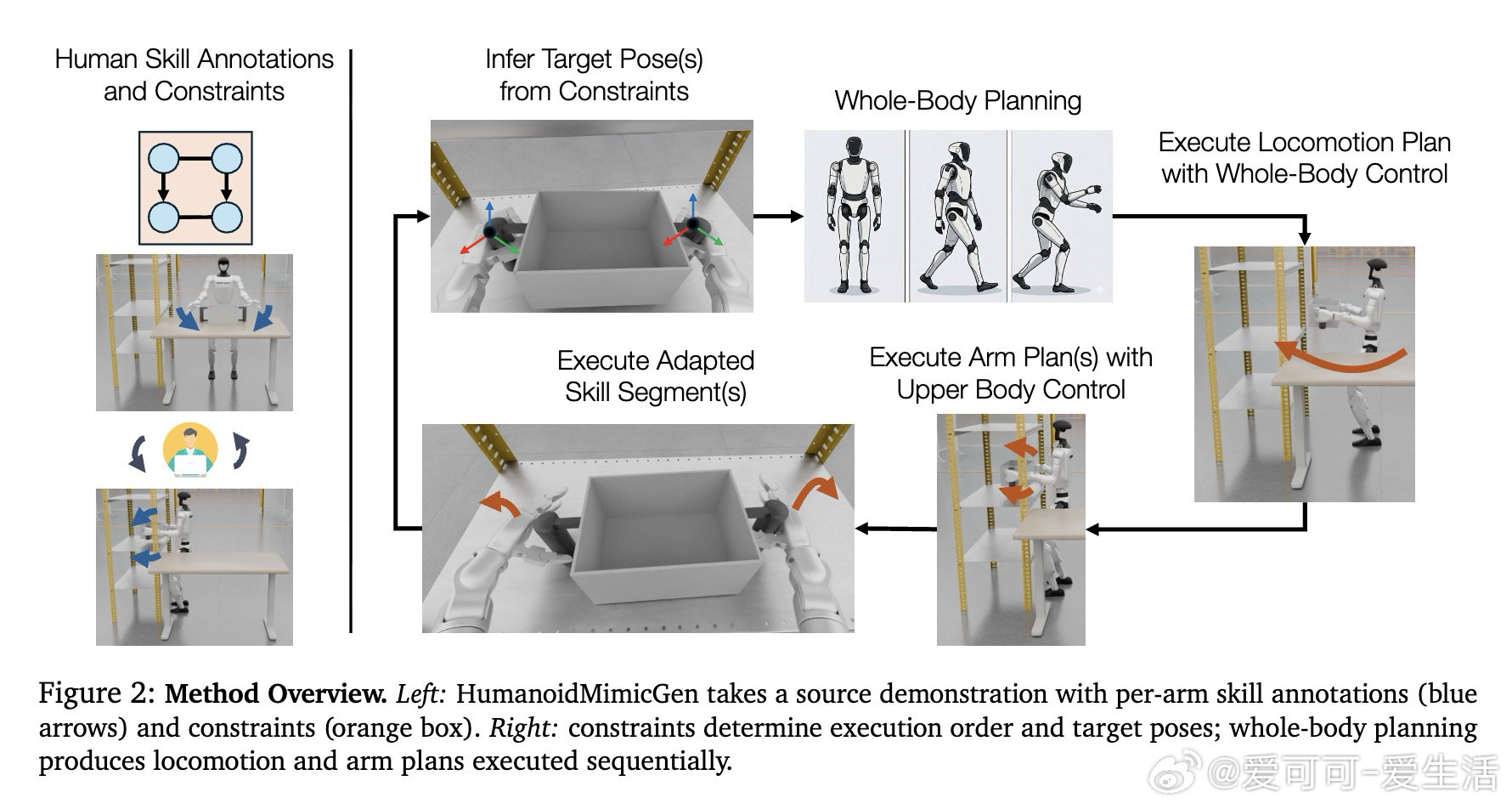
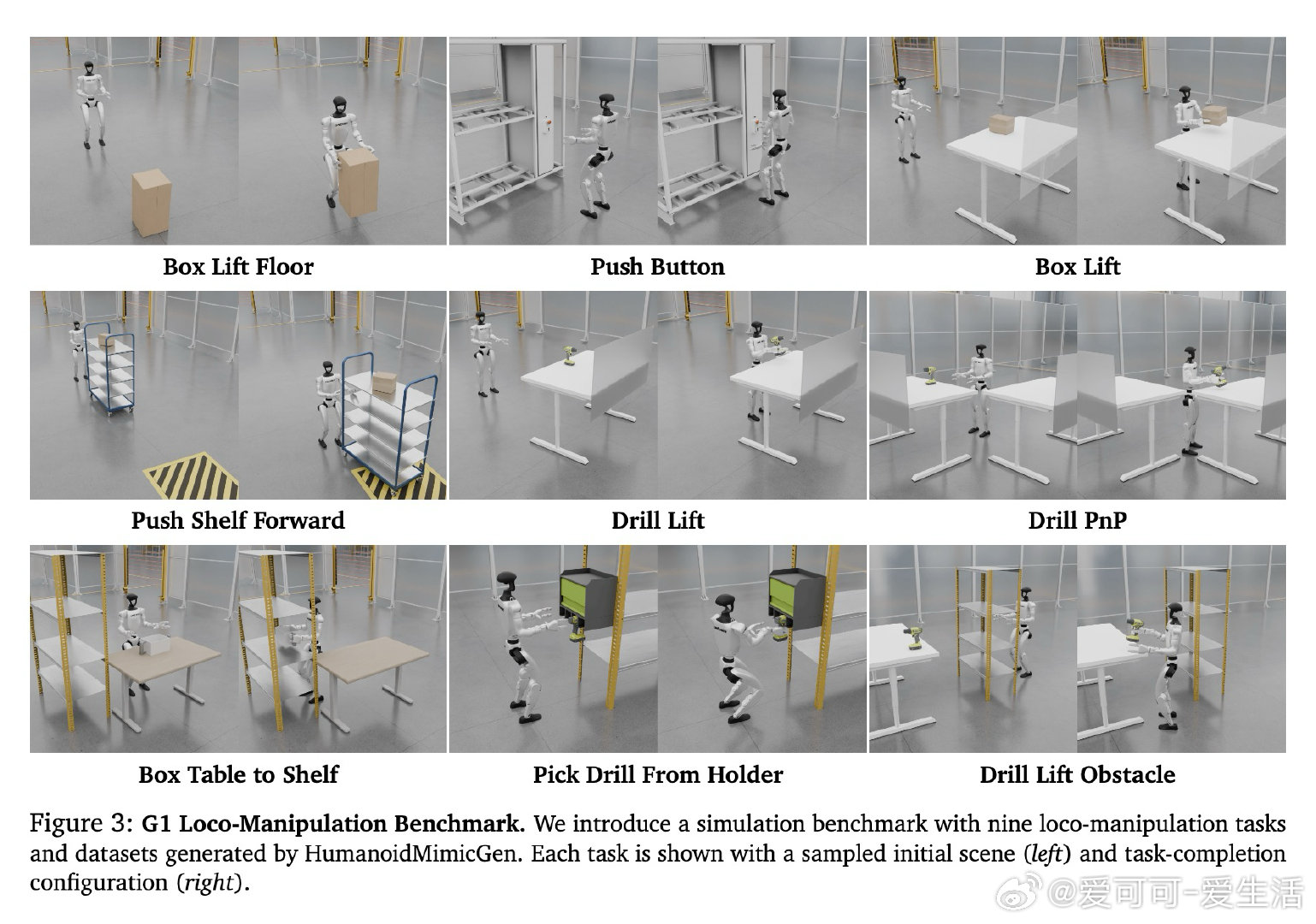
本文的核心洞见是:把长程任务拆成可迁移技能与全身规划。由此,先规划底盘与姿态,再适配手部技能,使一条示范扩增为千条可执行轨迹。
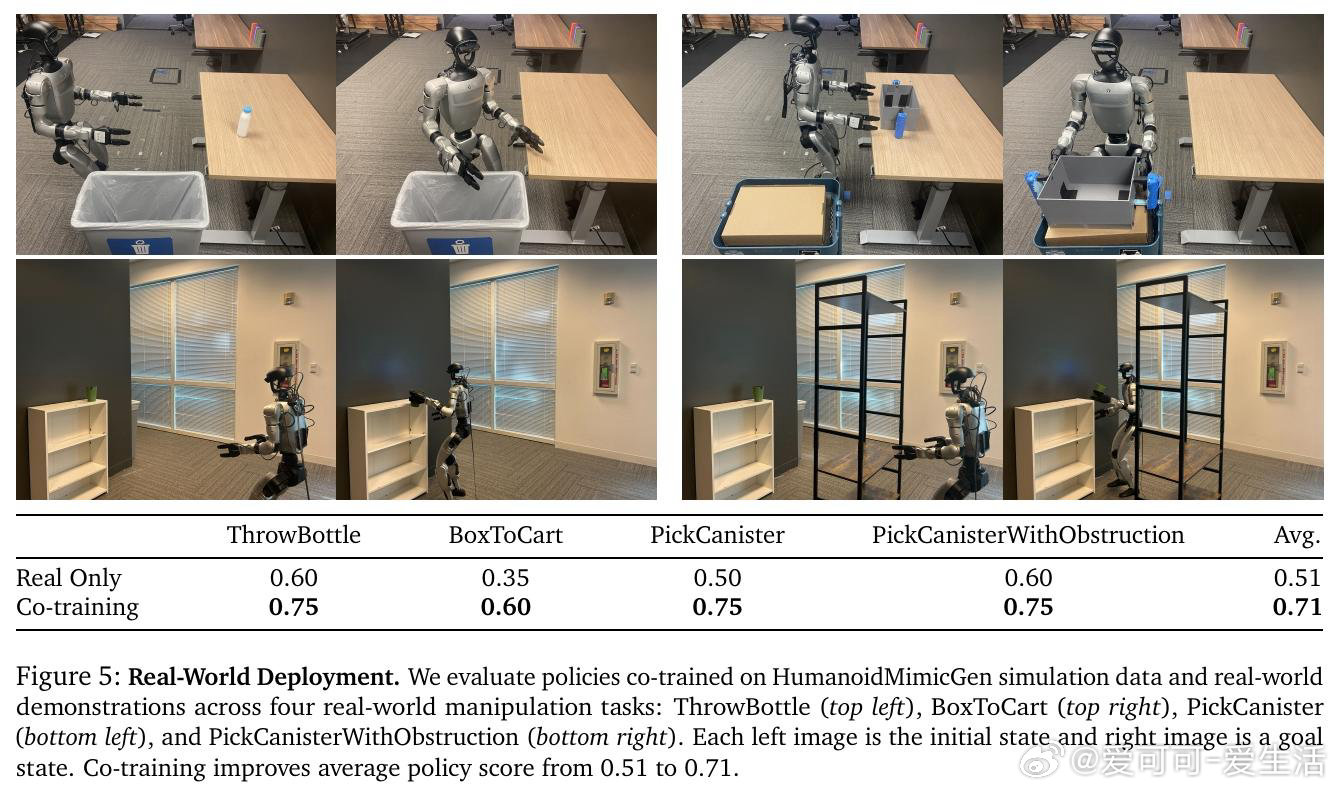
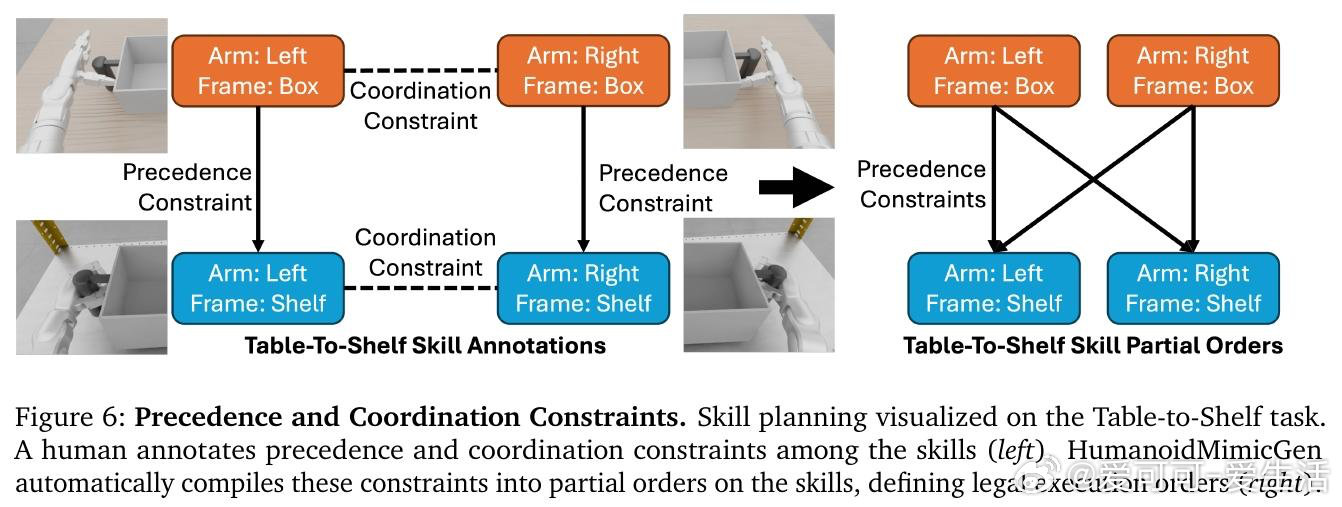
这项工作留下的是面向人形机器人的数据放大器。它打开了仿真生成与真实数据共训的新门,但仍依赖人工技能标注和固定技能顺序。
arxiv.org/abs/2605.27724 机器学习 人工智能 论文 AI创造营