【马斯克炮轰激光雷达,Uber却投下信任票!自动驾驶三大家路线激辩】
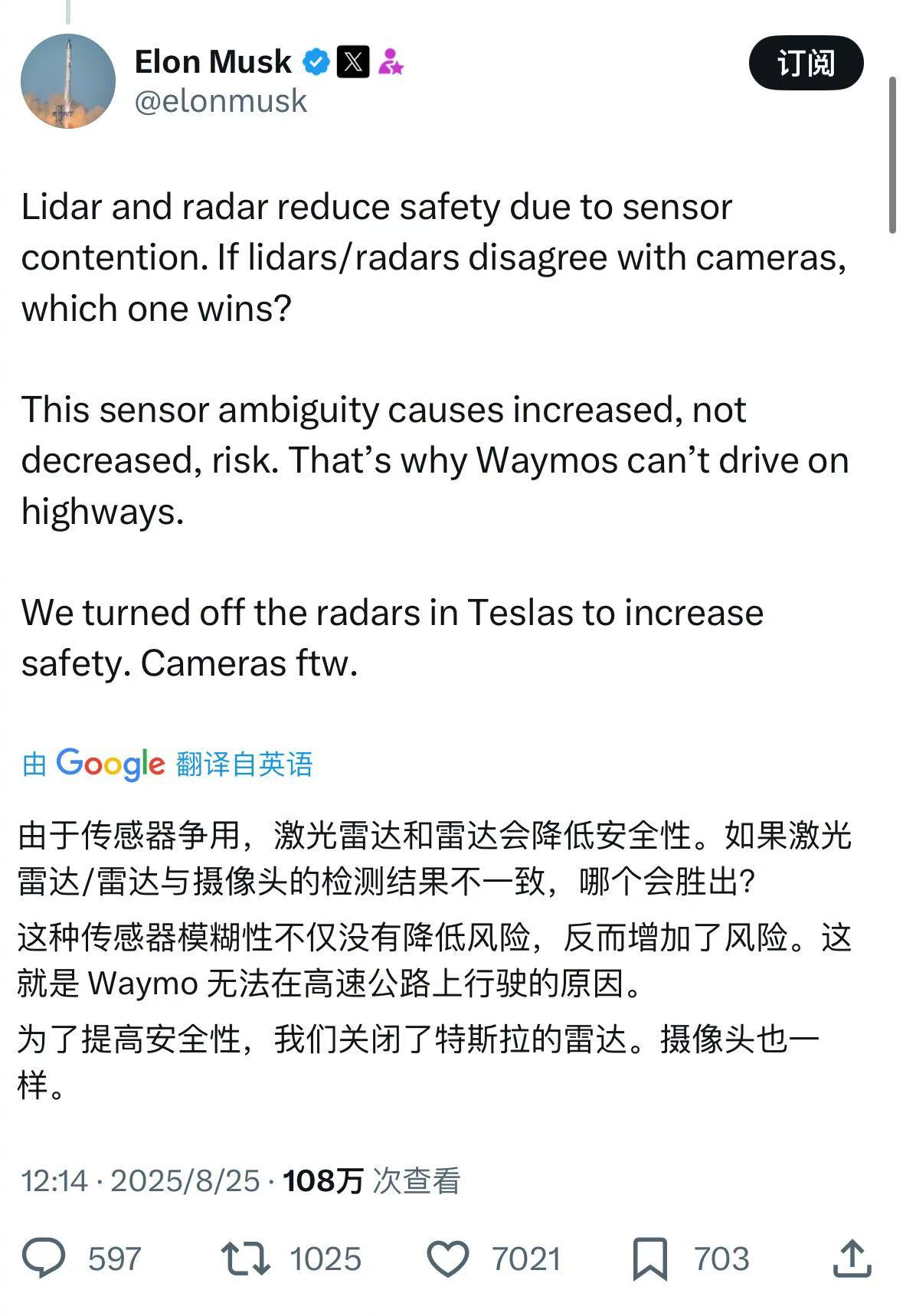
在过去的一周里,自动驾驶行业的三位重量级人物相继发声,掀起一场关于技术路线的激烈论战。特斯拉CEO埃隆·马斯克再次抛出惊人言论:“装上激光雷达和雷达,会让自动驾驶车辆更危险”;与此同时,Uber CEO却明确支持百度Apollo的激光雷达路线;百度创始人李彦宏则在内部会议上客观分析了两条路线的现状与未来。这三位大佬的隔空交锋,揭示了自动驾驶行业不同技术路线之间的深刻分歧。
马斯克一直公开贬低激光雷达技术,但业内数据显示,特斯拉在实际测试中却使用激光雷达收集路测数据。这种表面拒绝与实际使用的矛盾背后,藏着马斯克的两大考量:一是对激光雷达安全性的真实担忧,二是成本因素。直到近年来,激光雷达价格仍然昂贵,不适合特斯拉大众化电动车的定位。
Uber不仅投了激光雷达路线一票,更与百度萝卜快跑达成了史上最大规模的无人驾驶合作。这一选择证明了当前阶段激光雷达路线的可靠性。百度选择的激光雷达技术方案强调系统的可靠性和安全冗余,确保了在海外环境中的适应性和稳定性。据计划,萝卜快跑将于2025年下半年与Uber合作,在亚洲和中东推出无人驾驶出租车服务,2026年进军欧洲市场,未来几年将在全球部署数千辆自动驾驶汽车。
李彦宏在内部会议中的分析更为客观:激光雷达(多传感器融合)是目前真正跑通的技术,在中国市场还具有成本优势。纯视觉技术虽然还在早期阶段,但未来也有发展空间。 激光雷达价格的暴跌正在改变行业竞争格局。十年前,一颗64线激光雷达售价高达8万美元,而今天萝卜快跑第六代无人车配备4颗远距激光雷达成本只要3.5万元人民币。这一变化主要源于规模效应——2025年全球L2+量产潮将激光雷达年需求量推高到百万级,规模扩大了,边际成本自然下降。
行业数据显示,顶级L4自动驾驶公司几乎清一色选择激光雷达方案。Waymo、百度萝卜快跑等玩家均采用激光雷达+多传感器融合方案。加州DMV 2023年报告显示:Waymo(激光雷达)每百万英里仅需介入0.68次,而特斯拉(纯视觉)则需要介入3.2次。MIT研究数据也表明,激光雷达在夜间行人检测的准确率(98.5%)远超纯视觉(82.3%);雨雾天气下,纯视觉误检率升高4倍,激光雷达仅升高1.2倍。
激光雷达方案的优势包括:厘米级测距精度、全天候稳定工作、360°无死角探测、与多传感器互补提供安全冗余。相比之下,纯视觉方案存在明显劣势:依赖光照条件,夜间、逆光、雨雪雾天气下性能骤降;测距精度有限;对罕见场景的泛化能力不足。 通俗来说,纯视觉方案就像人眼开车,但比人眼更挑环境:晚上、太阳直射、雨雪雾天气时,它的“视力”就会大幅下降。单目摄像头就像闭上一只眼睛看东西,距离估不准;双目摄像头虽然好点,但计算复杂度高。
这场争论远未结束,但随着激光雷达成本下降和技术成熟,天平正在向多传感器融合方案倾斜。无论如何,安全性和可靠性始终应该是自动驾驶技术选择的首要标准。