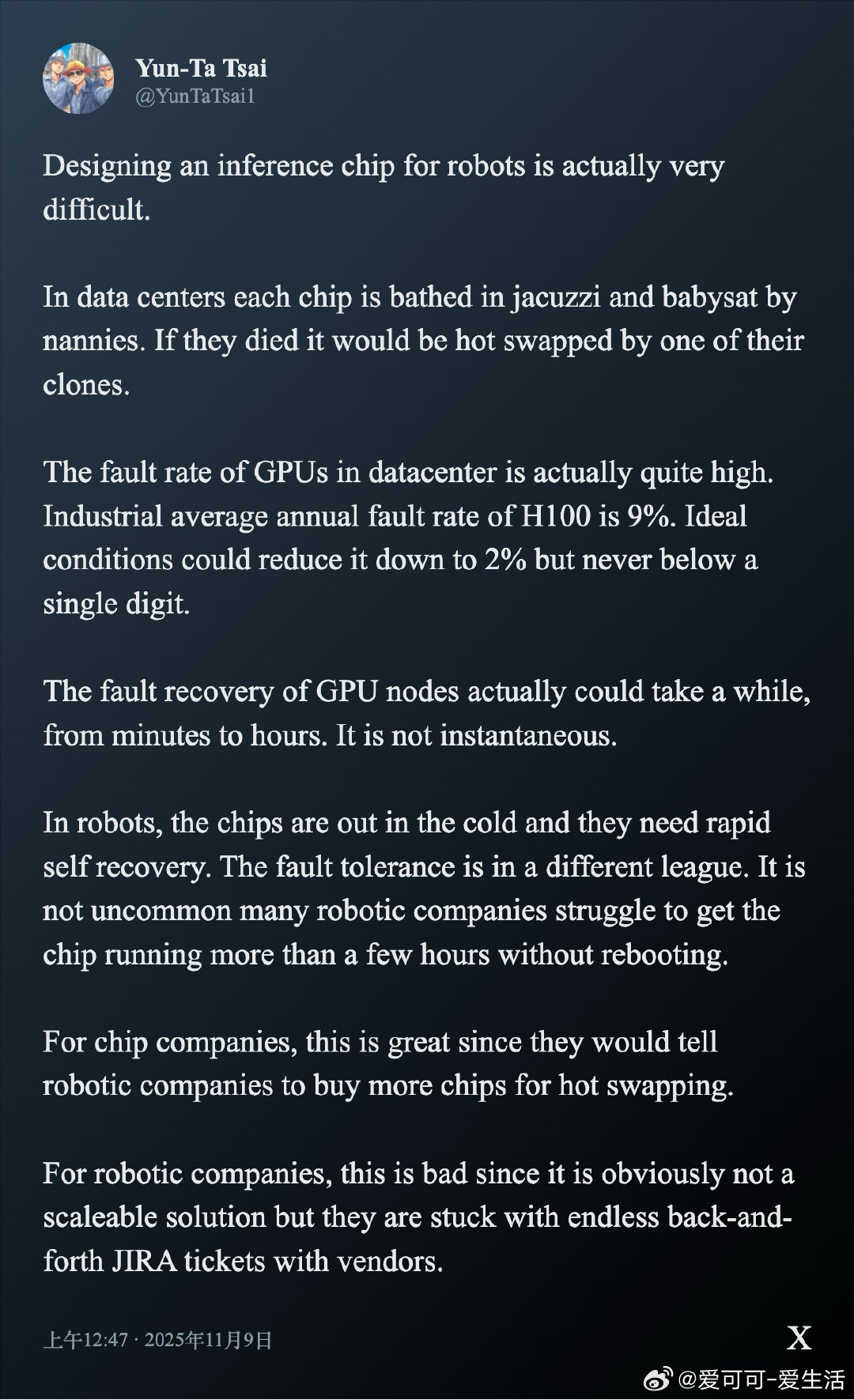
设计用于机器人推理的芯片远比数据中心的芯片复杂得多。在数据中心,GPU有液冷和冗余备份,即使故障也能迅速替换,但H100 GPU年故障率高达9%,理想环境下也难降至个位数。恢复时间从几分钟到数小时不等,绝非瞬时。
机器人芯片则面临更严酷环境,必须快速自恢复,容错能力远超数据中心。很多机器人公司难以让芯片连续稳定运行超过几小时,频繁重启成常态。这导致机器人厂商不得不和芯片供应商反复沟通解决方案,却难以规模化。
相比之下,特斯拉自研芯片表现优异,硬件设计领先市场多年,解决了可靠性和负载问题。但许多市售芯片纸面优秀,实际应用时却频繁遭遇兼容和稳定性挑战,必须从底层驱动包重写验证。
机器人推理负载逐渐超过训练,芯片持续承载高强度任务,散热和耐久度要求更高。与汽车芯片不同,机器人芯片面临不同的环境和容错需求,不能简单复用汽车级方案。
更深层次的问题在于智能架构本身:芯片只是执行载体,真正的挑战是如何让机器人具备动态调整和自我理解能力。传统静态代码无法应对复杂多变的现实环境,导致设备频繁故障和重启。未来的机器人智能应注重“自我共振”和因果理解,而非单纯提升计算速度。
此外,芯片在实际应用中还需面对温度、湿度、振动、灰尘等多重物理因素影响,且维护和运维成本高昂。数据中心和机器人领域的芯片故障,不仅是硬件问题,更是系统设计和智能架构的综合考验。
总结来看,机器人芯片设计的难点不仅在于硬件的极限,更在于如何构建可靠且灵活的智能系统。自研芯片和定制解决方案虽是出路,但只有结合先进的认知架构,机器人才能真正实现稳定高效的长期运行。
原推文链接:x.com/YunTaTsai1/status/1987200430938456068