关于GB 44721《智能网联汽车 自动驾驶系统安全要求》的报批稿,很多人其实没有抓到重点。
核心可以概括为几个字:禁止浑水摸鱼。
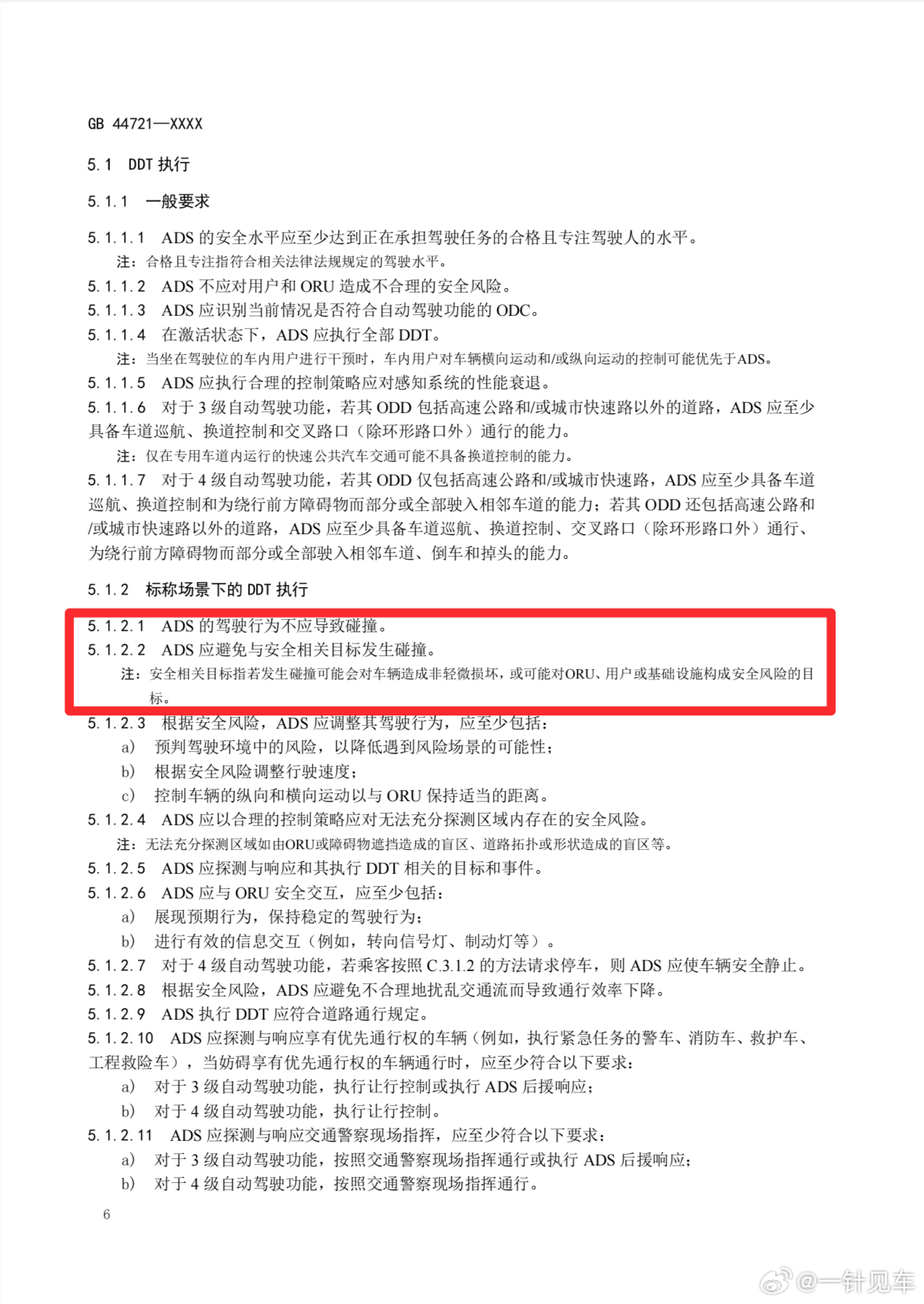
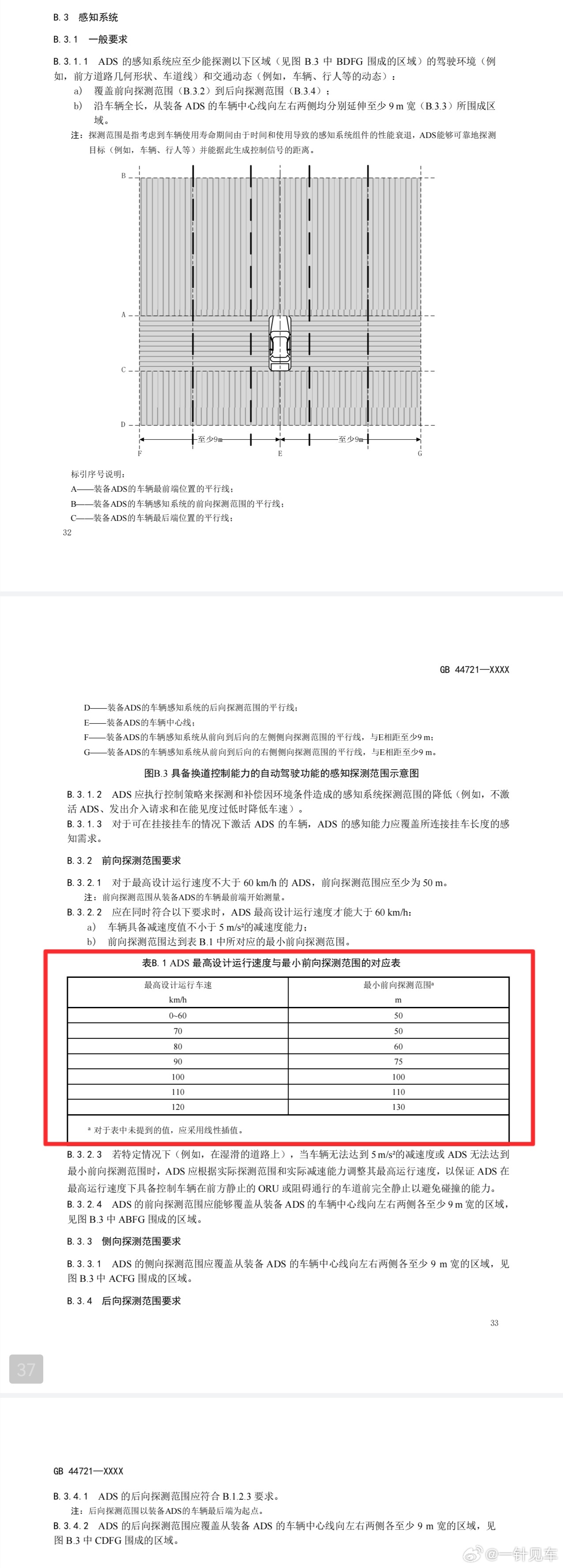
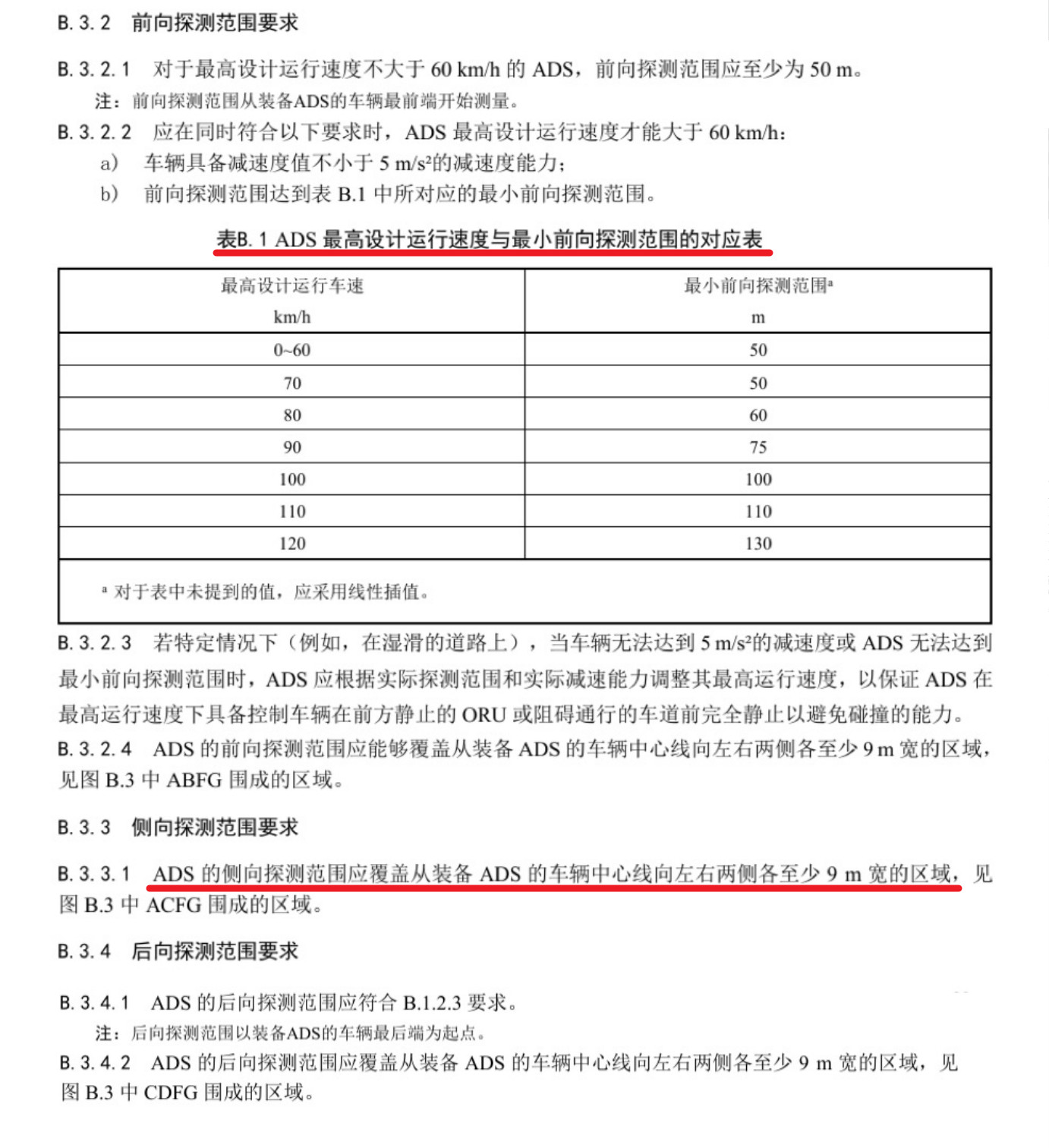
此话怎讲?先看图1,这里明确对于自动驾驶系统在不同速度下的感知距离提出了具体要求。
这不是说传感器参数表上写着“最远探测200米”就达标了。探测范围的定义是,系统能够可靠探测目标,并据此生成控制信号的距离。
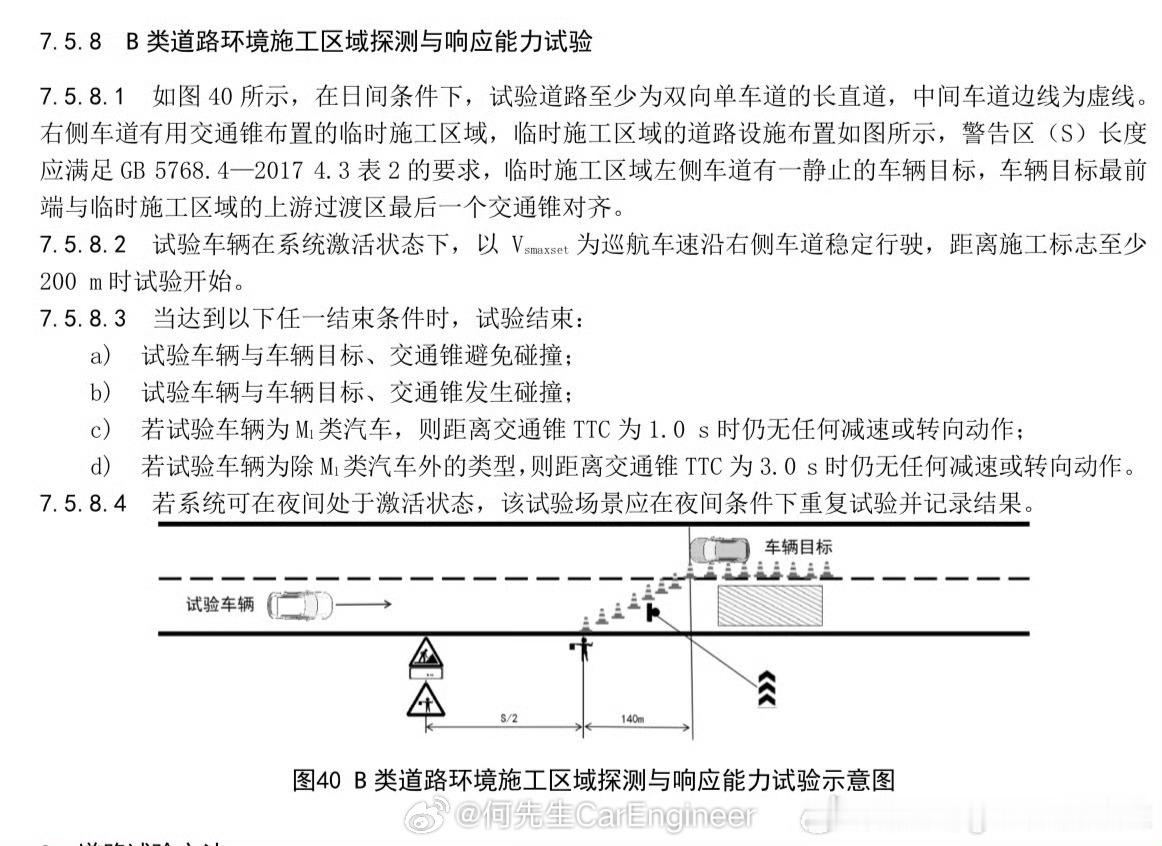
再结合图2,应避免与“安全相关目标”发生碰撞。换言之,高速上如果遇到一只突然飞出来的小鸟,可能确实难以避免碰撞,也不会造成严重损伤;而如果你开的车底盘高度13cm,前方出现了一个15cm高的硬物,那如果未能有效应对,撞上去显然可能造成严重损伤。
因此可以推论,在“不放水”的前提下,企业应当需要证明自己的自动驾驶系统能够感知到130米以内的这种小目标,并且能避免碰撞。
而且,还要考虑不同的环境因素影响。
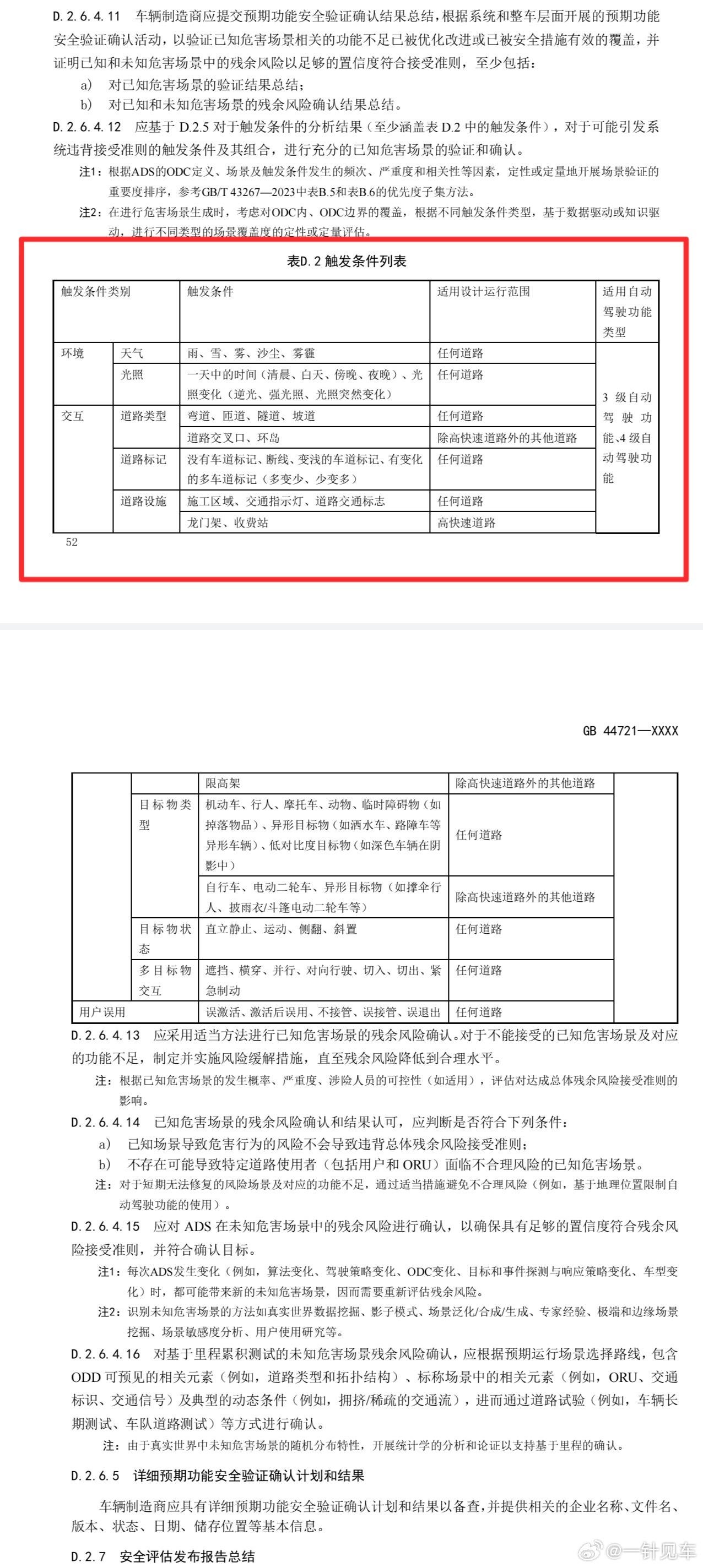
这就要说到更关键的图3——表D.2中明确列出了雨雪雾等天气因素、光照变化(如逆光)、隧道等等。
所谓触发条件,就是系统本身未必发生故障,但外界环境可能让原本的感知判断能力下降,进而暴露安全风险。
再结合图1中B.3.1.2“应执行控制策略来探测和补偿因环境条件造成的感知系统探测范围的降低”的要求,这意味着,,企业不能只说“我在白天条件良好的时候能达标”,还必须回答:
黑夜、大雨行不行?雾天行不行?隧道等大光比场景行不行?
如果行,就要拿出证据;如果不行,就要明确画出ODD边界,并保证系统在不符合条件时无法激活,或者能够提前识别、降速,并安全退出。
还有一个很值得关注的场景:假如在黑夜国道上,对向出现了一个“太阳”——大货车的远光灯恰好直射在自车摄像头区域。
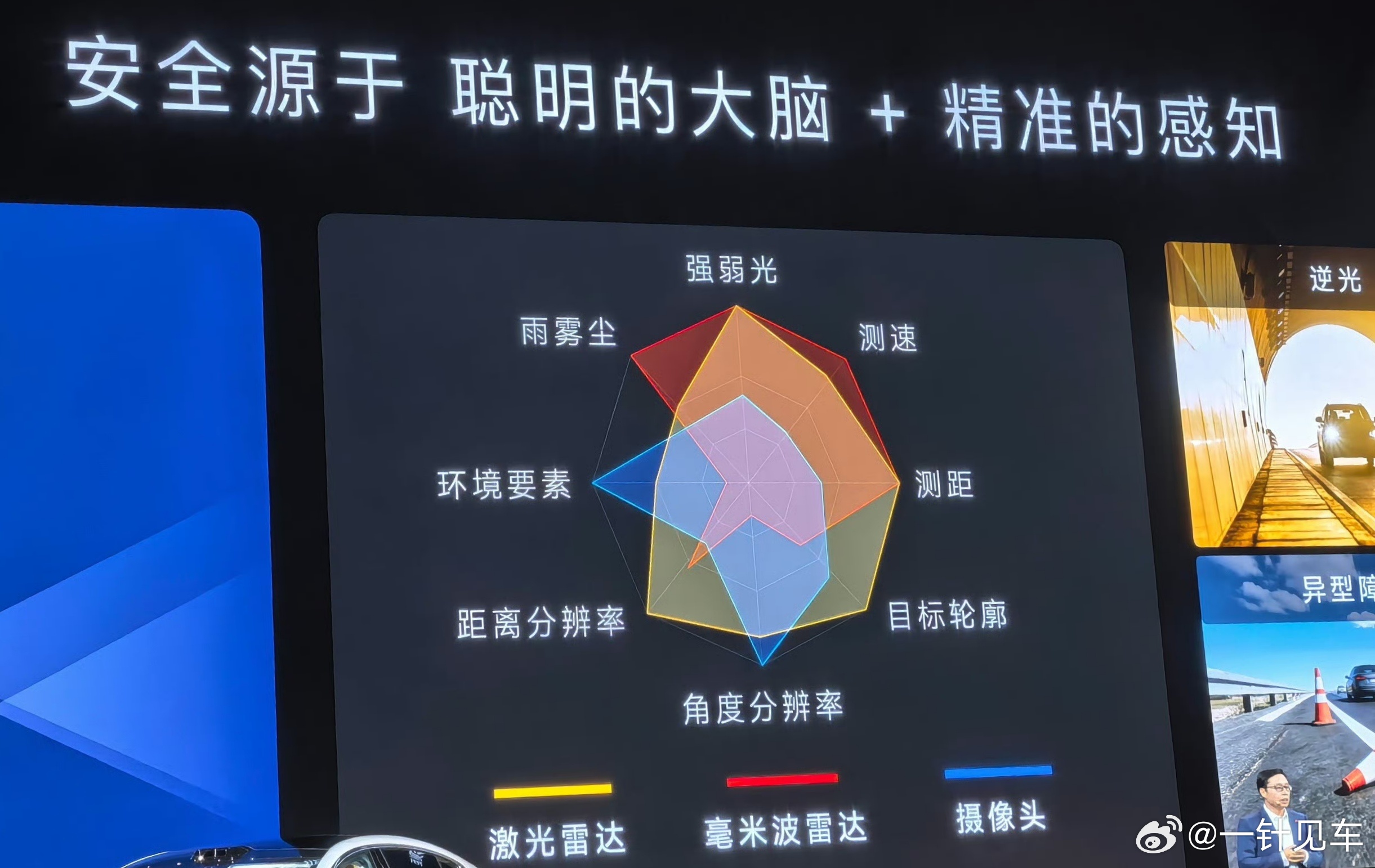
如果有激光雷达,那影响比较可控,但如果仅凭摄像头,能否在这种场景下保障安全?这个场景很值得关注,因为它不像雨、雾、隧道等,往往可以提前探测并作出应对,而是可能随机突然发生。
如果拿不出明确、可靠的安全应对策略,那严格来讲,存在这样的漏洞,系统是不是直接不应该在被允许在夜间使用?
所以这份标准虽然没有直接规定必须使用激光雷达、4D毫米波雷达等等,但它把安全底线和证明责任讲得很清楚。
你可以用融合感知,也可以选择纯视觉,但无论哪条路线都不能含糊其辞,而是必须把自己的真实能力讲明白:能看多远、什么天气/环境下还能看清、能力下降后怎样降速、应对,什么时候必须退出。
激光雷达、4D毫米波雷达都是一种工具,你可以不用,但是别想浑水摸鱼。一定要说清楚,你靠视觉能达到什么样的水平?在视觉的弱势场景,你真的能做到融合感知一样的实力吗?
标准不预设技术路线,但也不允许只挑自己擅长的理想场景展示成绩、证明能力。出于对用户安全的考虑,我们当然是希望没有被严格执行的自动驾驶标准。
L3、L4不是喊一个口号,更不是系统敢开、厂家敢吹就算成功。真正的门槛是厂商能不能把能力边界,安全措施,验证证据等等证明一项项摆到台面上,经得起审查
这才是“禁止浑水摸鱼”真正的含义。
相信时间会给出答案。